UWaterloo 1A Mechatronics Term Project.
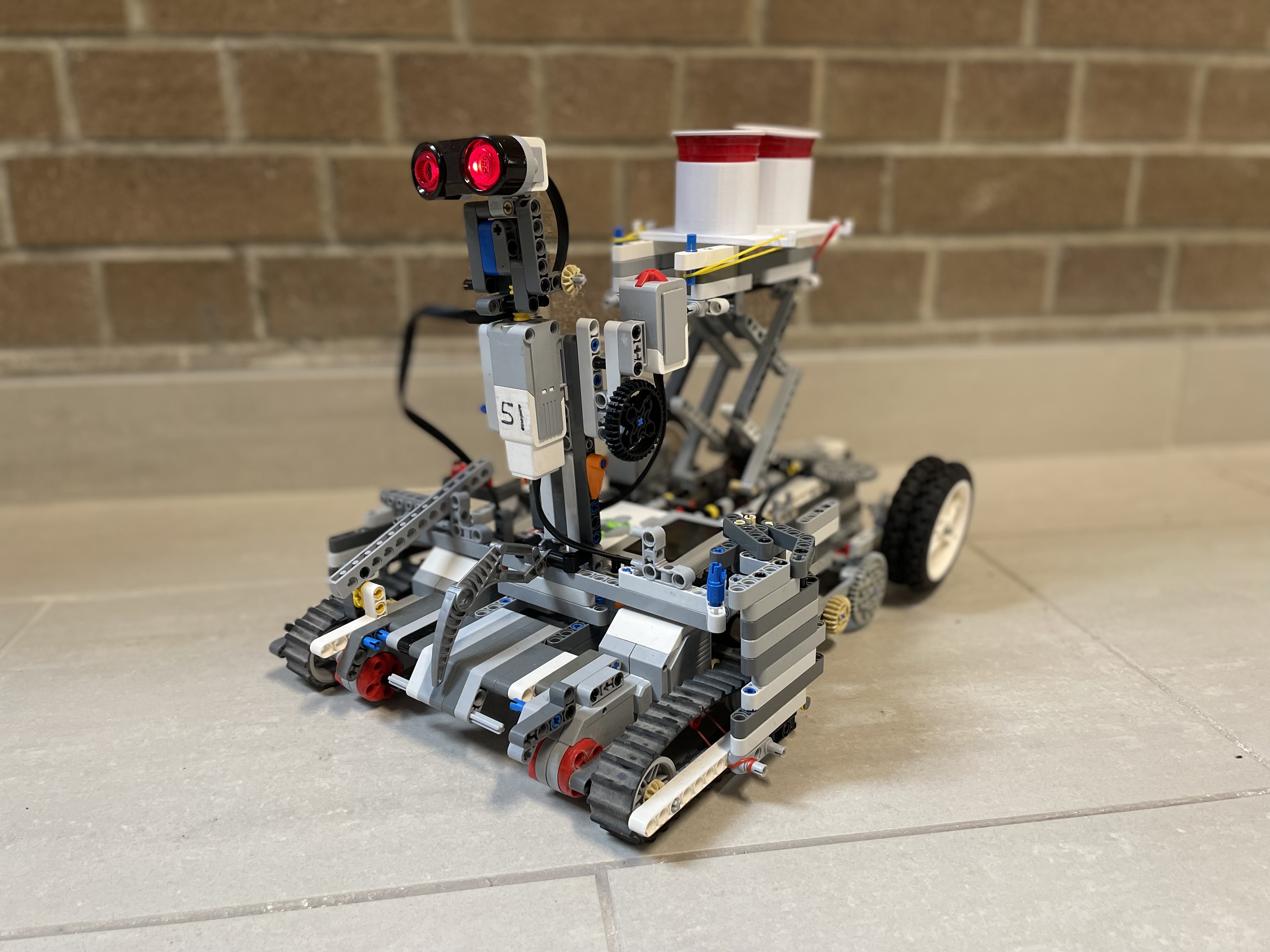
Worked with 3 group partners to design and create an autonomous drink delivery robot, using Lego EV3 Mindstorm hardware. The group used 4 motors, an ultrasonic sensor, gyro sensor, custom 3D printed pieces and many other inputs to form an intricate hardware design, made from primarily lego pieces. All built from scratch and programmed using RobotC, the BarBot was designed to safely deliver drinks to tables specified through file input. It had the ability to safely accelerate and decelerate, along with a number of different features, including its shut down procedure which could be activated at any time by the press of a button, in case of an emergency stop. The BarBot was capable of detecting any obstacles within its path and it could differentiate and execute an object avoidance plan based on the type of obstacle, moving or stationary. Along with its many other functions, the BarBot successfully completed all tasks with a margin of error less than 10 centimetres.