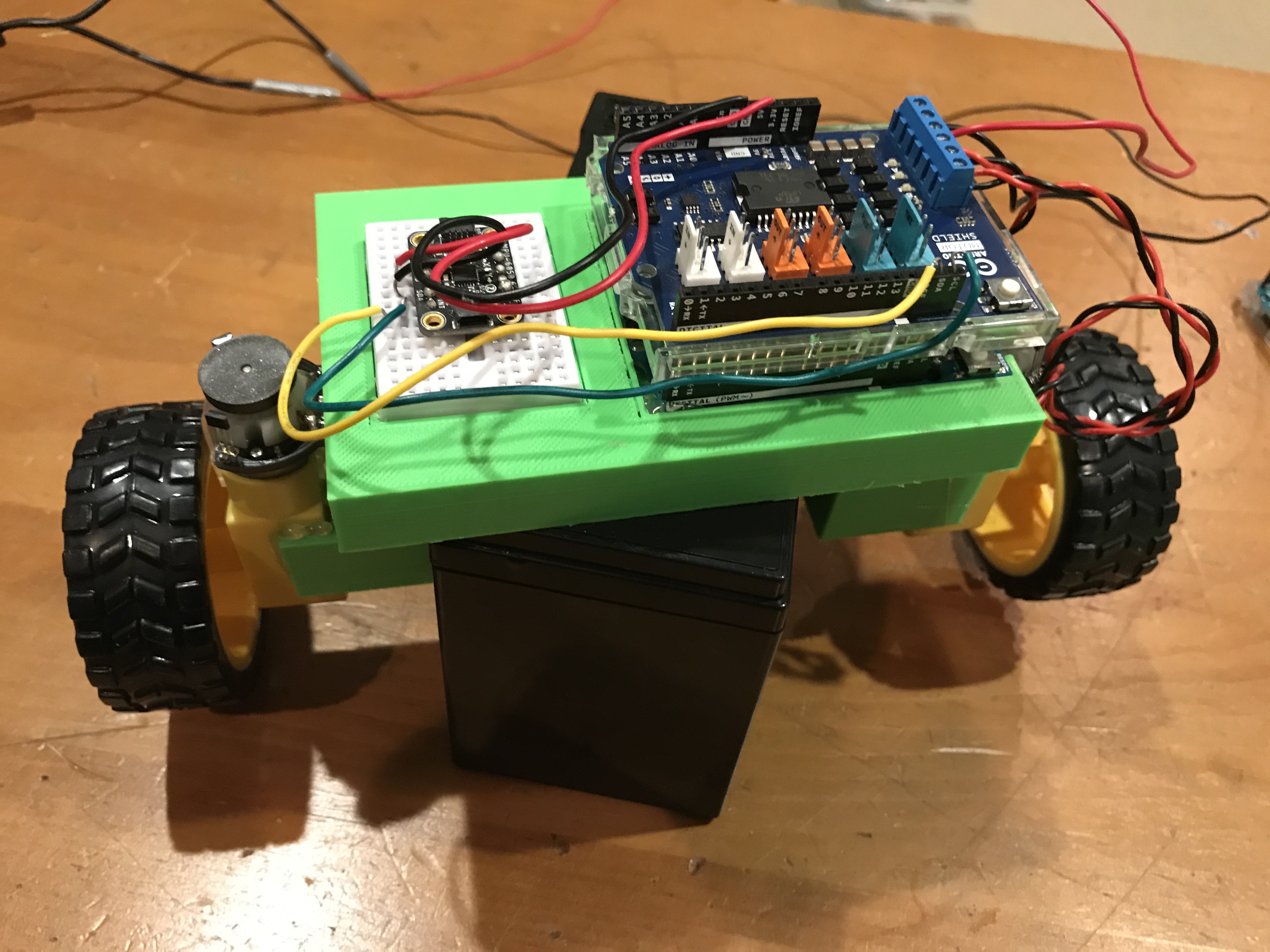
Using simple neural networks to replicate sensor fusion and dual-loop PID control of a self-balancing robot. The inner PID loop controls the robot's attitude, and the outer controls its translational position. The robot uses an MPU-6050 IMU (gyroscope + accelerometer) for feedback on its attitude and an encoder on one of its wheels for feedback on its position.
CAD_files/ - files used to 3D print robot's body
components/ - arduino files for testing different components before integrating together
PID_controller/ - arduino file for dual-loop PID controller
NN_controller/ - arduino file for neural network(s) controller
LQR_control_arduino/ - arduino file for LQR controller (currently not working)
LQR_model.py - script to generate LQR gains from state dynamics and simulate performance
NN_angle_predictor.py - script to train network that predicts robot attiude from sensor readings
NN_arctangent.py - script to approximate arctangent with a neural net (sanity checking)
NN_data_generator.py - script to generate training data (randomly generates inputs and calculates PID outputs) for angle prediction and controller networks
NN_PID_controller.py - script to train controller network
NN_util_funcs.py - utiliy functions for neural network training (random batch selection and calculating loss and accuracy)
NN_weights_saver.py - saves neural network weights to .txt files for easy copying into .ino files
pend_bot_LQR_requirements.txt - run pip install -r pend_bot_LQR_requirements.txt in an anaconda environment to install dependencies for LQR python scripts (or just download the packages listed in the file)
Input: [last angle estimate, acceleration in y, acceleration in x, rotational velocity about x]
Output: [ New angle Estimate ]
Layers:
-
Input [4]
-
Hidden [6]
-
ReLU
-
Output [1]
Input: [last angle estimate, rotational velocity about x, current_encoder_reading, last_encoder_reading]
Output: [ Desired PWM ]
Layers:
-
Input [4]
-
Hidden [10]
-
ReLU
-
Output [1]